There are 3 posts tagged with
# transmission

Robotic Arm:
Pulley & Belt Transmission
February 13th, 20175 min read
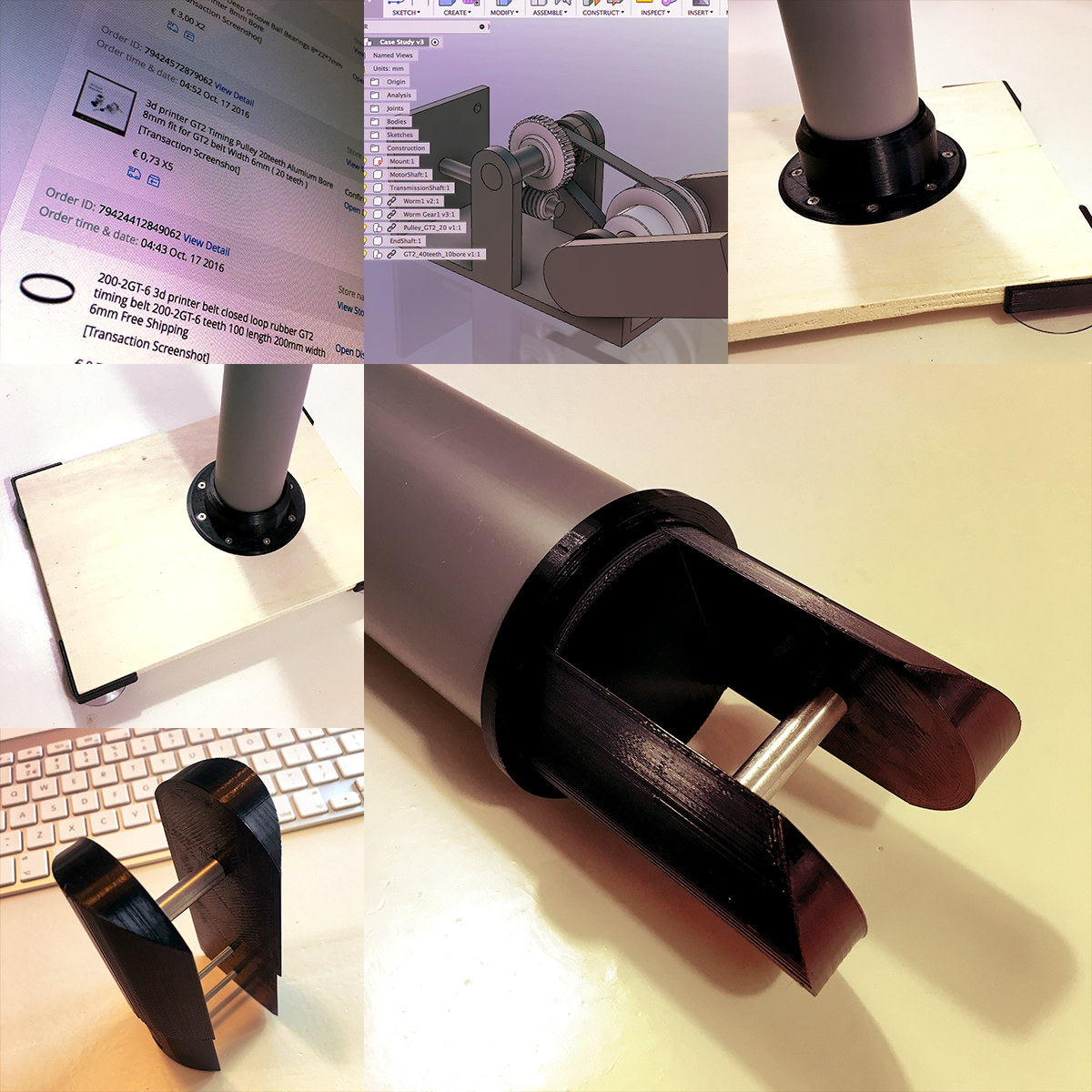
Admittedly, building a robot arm joint transmission is way more difficult than I expected. But where’s the fun in a simple project? In my last post, I explained why a geared transmission doesn’t work. This week I’ll try a new approach.
Read more
Robotic Arm:
The Backlash of Cheating
January 30th, 20173 min read
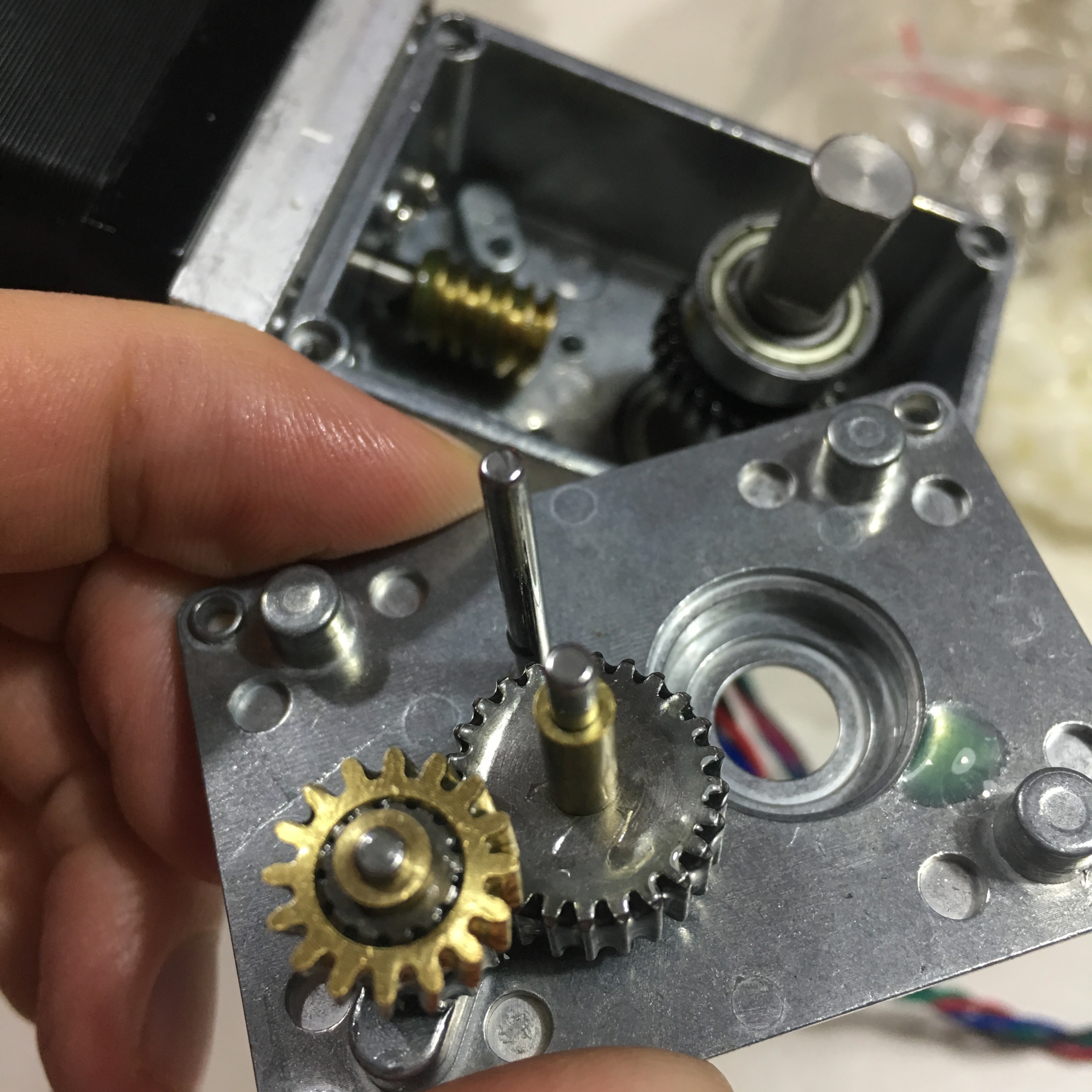
A few weeks ago I finish the first prototype of the stepper transission I need for my Robot Arm joint. In the process of improving this transmission, I tried some 3D printed gears and ended up cheating …
Read more
Robotic Arm:
Building my own DUM-E Robot!
November 7th, 20165 min read
Let’s face it. Every maker wants to become the next Tony Stark. And even though my Power Suit looked fun, it wasn’t really capable of protecting the world against the bad guys. Let’s work on something a bit more doable …
Read more