
Pulley Power!
For both my automatic curtains as well as my robot arm joint I ended up using GT2 belts and pulleys. But although printing GT2 pulleys is possible, the 3d printed pulleys tend to skip some teeth quite easily when they are used in high torque applications. Just as an experiment I though to give HTD 5M belts a try.
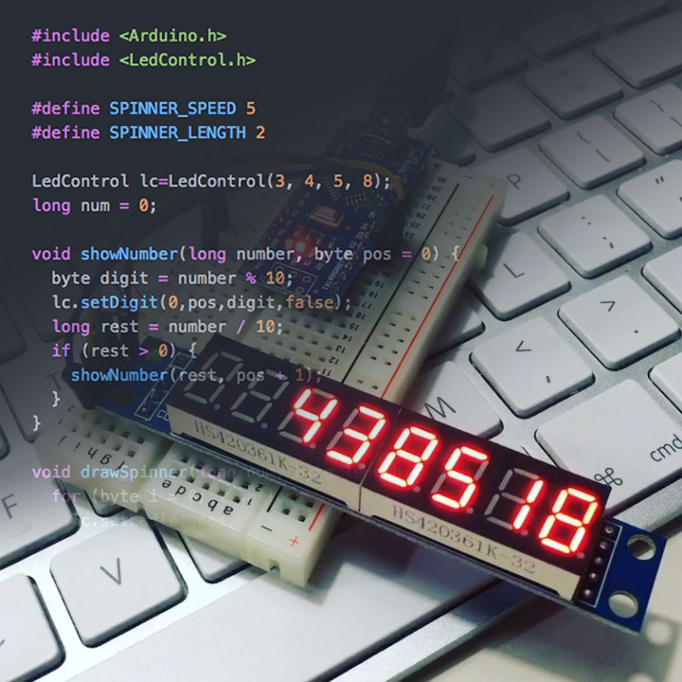
The Recursive LedControl Counter
2 weeks ago I posted a small clip on my Instagram which showed a MAX7219 counter demo. Using this 8 digit, 7 segment display is pretty straight forward, but some people asked me how I printed the incremetal counter, since the MAX7219 LedControl library only allows you to print one digit at a time …
Automatic Curtains:
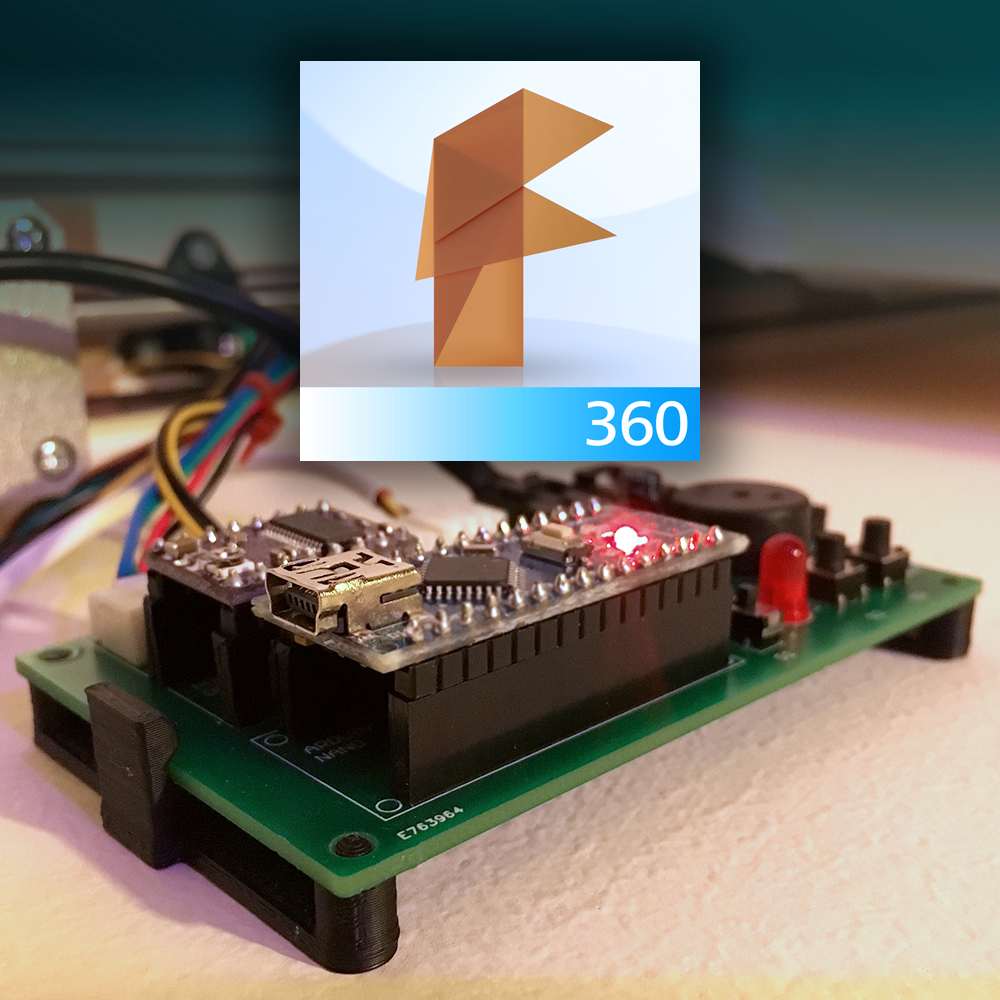
Designing a PCB Mount in Fusion 360 [Video]
With the Automatic Curtain Motor Controller ready, it’s time to mount it below the motor unit. Since I want it to be easily removable for maintenance, I used Autodesk Fusion 360 to quickly draw a 3D printable PCB mount.
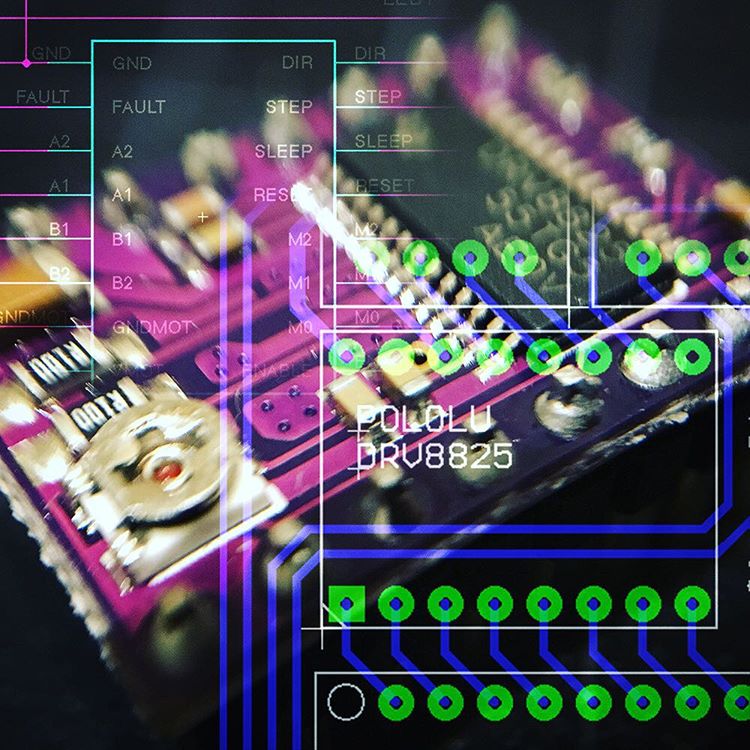
Creating custom parts in Eagle (Video!)
For my automatic curtain project I’m currently working on the design of the motor driver PCB in Eagle. The stepper motor driver I’ll be using is the Pololu DRV8825. Unfortunatly, this device is not available in the Eagle library, so I had to make this part myself.